Gelenkarm-Manipulator für Lasten bis 50 kg
Beschreibung
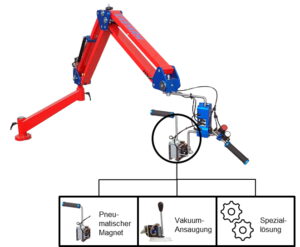
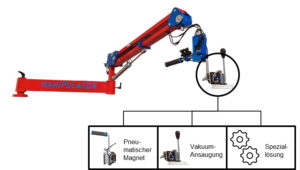
Der Rover Manipulator ist ein Zwei-Gelenkarmsystem, das es erlaubt, Werkstücke bis 100 kg ohne Belastung für den Anwender hochzuheben. Das System kann frei rotieren und erlaubt eine horizontale Reichweite bis zu 1685 oder 1915 mm, je nach Variante. Der Manipulator ist pneumatisch betrieben und wird mit einem Steuerungshebel am Griff bedient. Das Greifsystem ist entweder mit einem pneumatischem Greifer, einem pneumatisch gesteuerten Magneten oder mit einem Vakuumsystem ausgestattet. Kundenspezifische Speziallösungen können realisiert werden.
Technische Daten
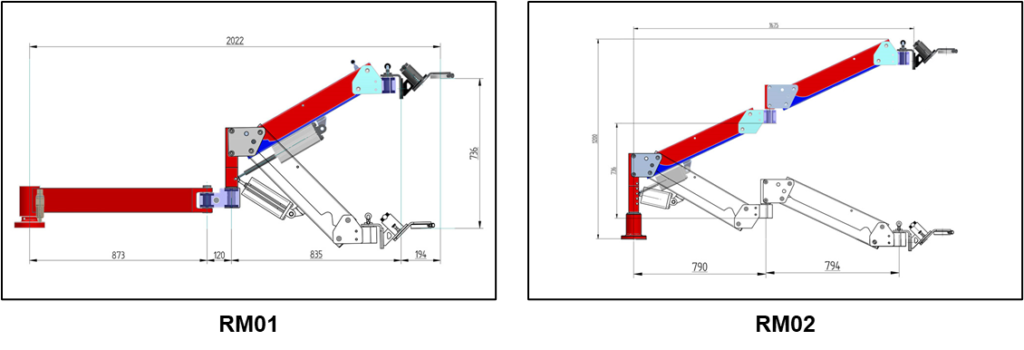
Varianten
| Modell | Luftdruck (Bar) |
Greifsystem | Gewicht (kg) | Reichweite horizontal (mm) | Reichweiter vertikal (mm) | Zulässige Last auf Gelenkarm |
| RM01 | 6 – 8 | Pneumatischer Greifer, pneumatischer Magnet oder Vakuum | 60 kg | 1915 + Greifer | 736 | 1 – 100 kg |
| RM02 | 6 – 8 | 40 kg | 1685 + Greifer | 736 (Lastenarm)
+ 500 (einstellbarer Arm) |
1 – 50 kg |
Produktvideo
Zubehör
Transportwagen, höhenverstellbar mit Griff 800×800 mm

- Basisplatte: 30 mm Stärke
- Zentrale Säule zur Anbringung des Gelenkarms
- Höhenverstellbar bis 1110 mm
- 4 Räder, davon 2 gebremst
- Gewicht: 400 kg
Transportwagen 800×800 mm

- Basisplatte: 30 mm Stärke
- Zentrale Säule zur Anbringung des Gelenkarms
- 4 Stellfüße mit Teleskopschaft
- 4 Räder, davon 2 gebremst
- Gewicht: 350 kg